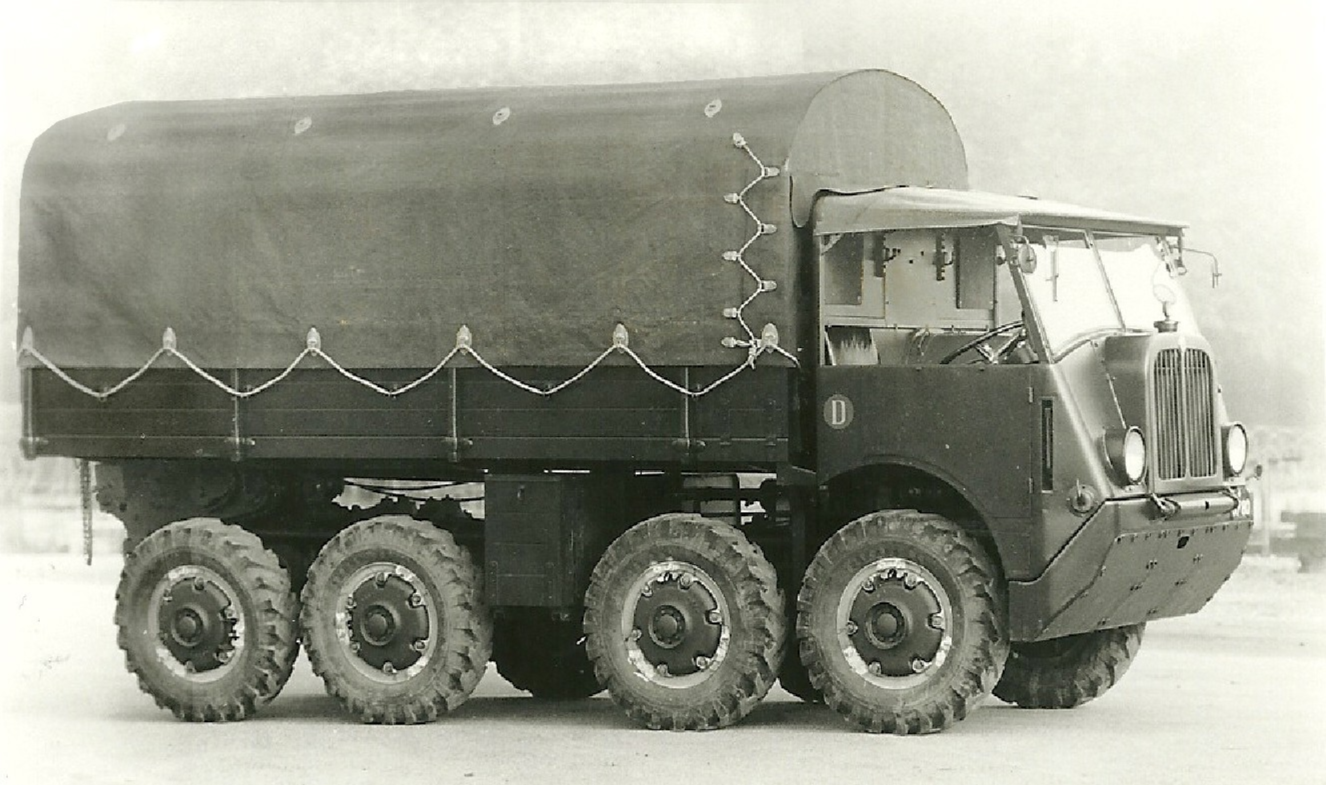
Das Flaggschiff der schweren Schwingachsfahrzeuge war zweifellos der Saurer 8M. Die Konstruktion stützte sich auf die Erfahrungen mit dem Versuchsfahrzeug 2M und den daraus gefolgten Weiterentwicklungen. Diese Fahrzeugkonzepte mit Zentralrohrrahmen, Schwingachsen und Frontlenkung hatten mittlerweilen einen guten Reifegrad erreicht. Der 8M wurde zum technisch aufwändigsten und wohl faszinierendsten Modell der Saurer-Schwingachser. Er erlangte Serienreife und wurde zwischen 1943 und 1945 in 79 Exemplaren der Schweizer Armee abgeliefert.
Text: Marcel Zaugg & Samuel Streiff
Die Schwingachsenkonstruktion beim Prototypen 2M hat sich im Gelände gut bewährt. Die Anpassungsfähigkeit an jedes Gelände gab der Armeeführung das Vertrauen, dass das Fahrzeug zuverlässig und möglichst schnell sein Ziel erreicht, dies auch abseits der Strassen. Von den starren, aber angetriebenen Kletterachsen, wie sie beim 2M und beim 4M noch verwendet wurden, sah man nun ab, stattdessen setzten die Konstrukteure auf ein Konzept mit vier gleichwertigen Achsen. Mit acht angetriebenen, einzeln aufgehängten Rädern wurde der für die damalige Zeit höchstmögliche Grad an Komplexität punkto Antriebstechnik und Radaufhängung realisiert. Dies alles erfolgte rein mechanisch, ohne jegliche Elektronik! Sinn und Zweck der Anordnung waren weiterhin, dass sich sämtliche Räder durch den Ausgleichsmechanismus dem Gelände anpassen können, egal ob ein- oder ausgefedert gleichmässig belastet werden und somit ein Durchdrehen einzelner Räder verhindert wird. Der Chassisrahmen bleibt dabei von sämtlichen Torsionsbelastungen verschont. Der Lösungsansatz für diese Achskonfiguration wurde bereits in der zweiten Hälfte der 30er Jahre entwickelt und 1937 unter den Objektnummern 4306 und 4307 international zum Patent angemeldet. Im Gegensatz zur Patentschrift wurden bei der Ausführung der Konstruktion des 8M die stabilisierenden Räderpaare an den Vorderachsen gewählt, da der unbeladene Wagen wegen der Anordnung des Motors kopflastig war. Dadurch konnte die Kippgefahr im Gelände gegenüber dem 4M und dem 6M erheblich verringert werden. Der Zentralrohrrahmen wurde entsprechend der vierachsigen Ausführung abgeändert und verlängert. Im Gegensatz zu den leichteren Fahrzeugkonzepten des 4ML, 6ML und 8ML (siehe Federblatt Nr. 69/Juli 2012) kam eine robuste Auslegung sämtlicher Komponenten (Rahmen, Halbachsen, Ausgleichsmechanismen) zur Ausführung, schliesslich sollte der 8M als schwerer Geländelastwagen bei einem Gesamtgewicht von stolzen 10,9 Tonnen bis 3,5 Tonnen Nutzlast transportieren können. Mit seinen vielen beweglichen Teilen und Gelenken stellte diese Entwicklung wohl die ausgeklügeltste und komplexeste Chassiskonstruktion dar, welche Saurer je in Serie herstellte.
 |
|
Saurer 8M-Prototyp im ursprünglichen Zustand. |
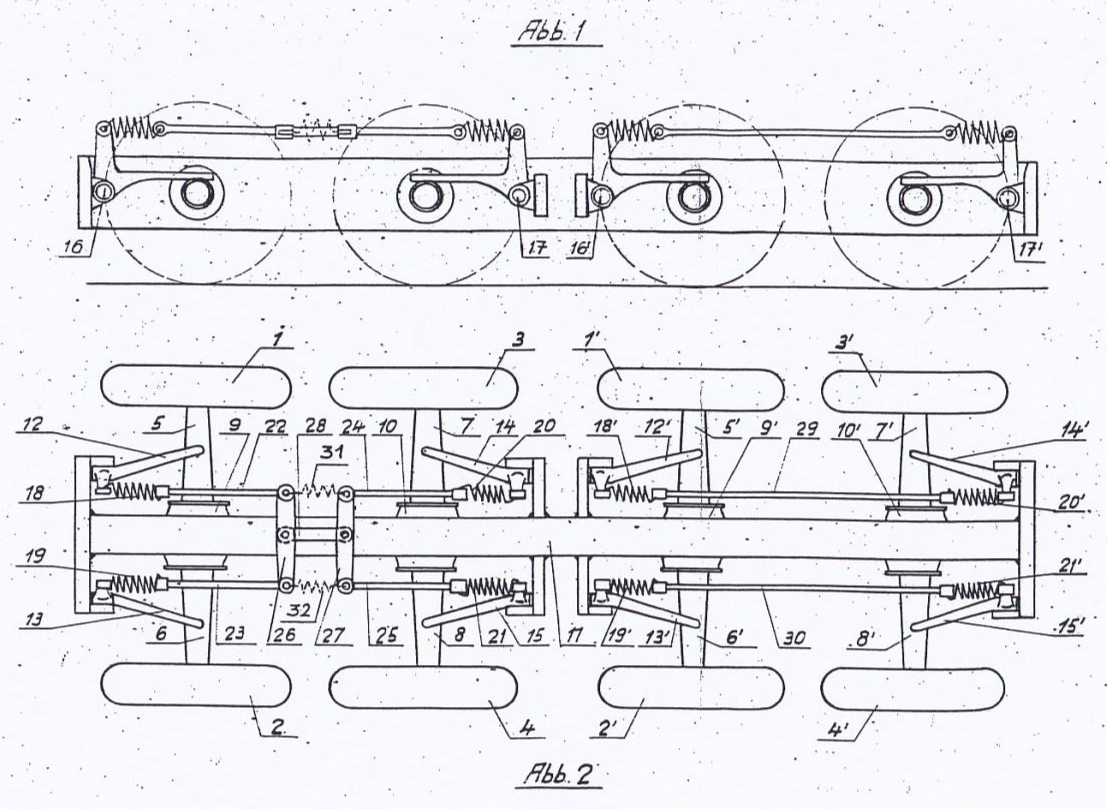
Beschreibung der Ausgleichsfederung aus der Patentanmeldung:
Dabei werden die 8 Räder für Ausgleich und Federung ebenfalls in 2 vierer Gruppen unterteilt. Nur die eine Gruppe, z.B. die 4 Hinterräder dienen zur Stabilisierung des Rahmens. Hier sind die beiden Räder der gleichen Wagenseite gegeneinander ausgeglichen. Die anderen 4 Räder sind so am Rahmen angebracht, dass die gleiche Wirkung entsteht, wie wenn der Rahmen mit einem Universalgelenk auf einem 4-Rad-Untergestell aufliegen würde, wobei die 4 Räder das Untergestell vollständig gegeneinander ausgeglichen sind, wie dies bei 4-Radwagen bekannt ist. Die Zeichnung Abb. 1 zeigt ein schematisches Ausführungsbeispiel im Aufriss und Abb. 2 den dazugehörigen Grundriss. Die Räder 1, 2, 3, 4 und 1‘, 2‘, 3‘, 4‘, die an den Schwingenden Halbachsen 5, 6, 7, 8 und 5‘, 6‘, 7‘, 8‘ mit den Antriebsgehäusen 9, 10 und 9‘, 10‘ im Fahrzeugrahmen 11 gelagert sind, stützen sich auf einen am Ende der Winkelhebel 12, 13, 14 15 und 12‘, 13‘, 14‘ ,15‘, die mit ihrem Scheitelpunkt 16, 17 und 16‘ 17‘ am Fahrzeugrahmen 11 drehbar gelagert sind, ab. Die Verbindung der vorderen 4 Räder 1, 2, 3, 4 untereinander geschieht folgendermassen: An den anderen Enden der Winkelhebel 12, 13 ,14, 15 sind Spiralfedern 18, 19, 20, 21 befestigt, welche mit den Stangen 22, 23, 24, 25 über je einen Balken 26 und 27 je ein Radpaar 1, 2 bezw. 3, 4 untereinander verbinden; diese beiden Systeme werden an den Balken 26 und 27 durch ein Verbindungsstück 28 gelenkig befestigt. Die Verbindung der 4 hinteren Räder 1‘, 2‘, 3‘ 4‘ geschieht folgendermassen: An den anderen Enden der Winkelhebel 12‘, 13‘, 14‘, 15‘ sind Spiralfedern 18‘, 19‘, 20‘, 21‘ befestigt, welche durch Stangen 29 und 30 die Räder jeder Fahrzeugseite 1‘, 3‘ bezw. 2‘, 4‘ untereinander verbinden.
 |
|
Text und Zeichnung aus der Patentanmeldung „Ausgleichsfederung für Kraftfahrzeuge“, datiert vom 13. Juni 1937. |
 |
|
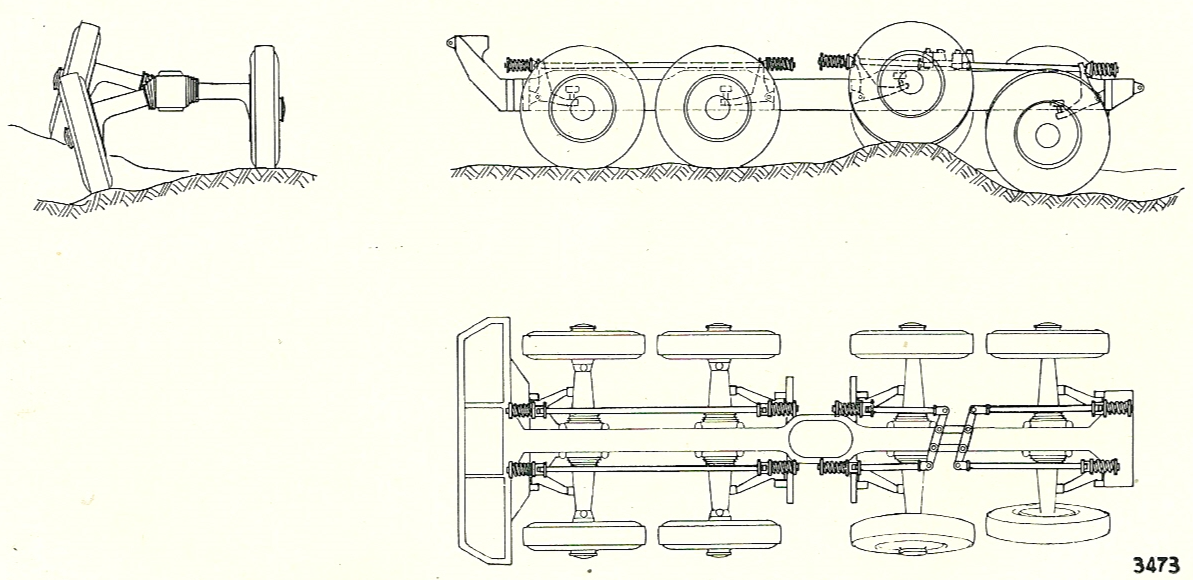
Testfahrten mit einem der Prototypen unter den wachsamen Augen eines Bürolisten, eines Mechanikers und eines Vertreters des Militärs: Sehr schön zu sehen, wie sich die einzelnen Räder dem Gelände anpassen. |
 |
|
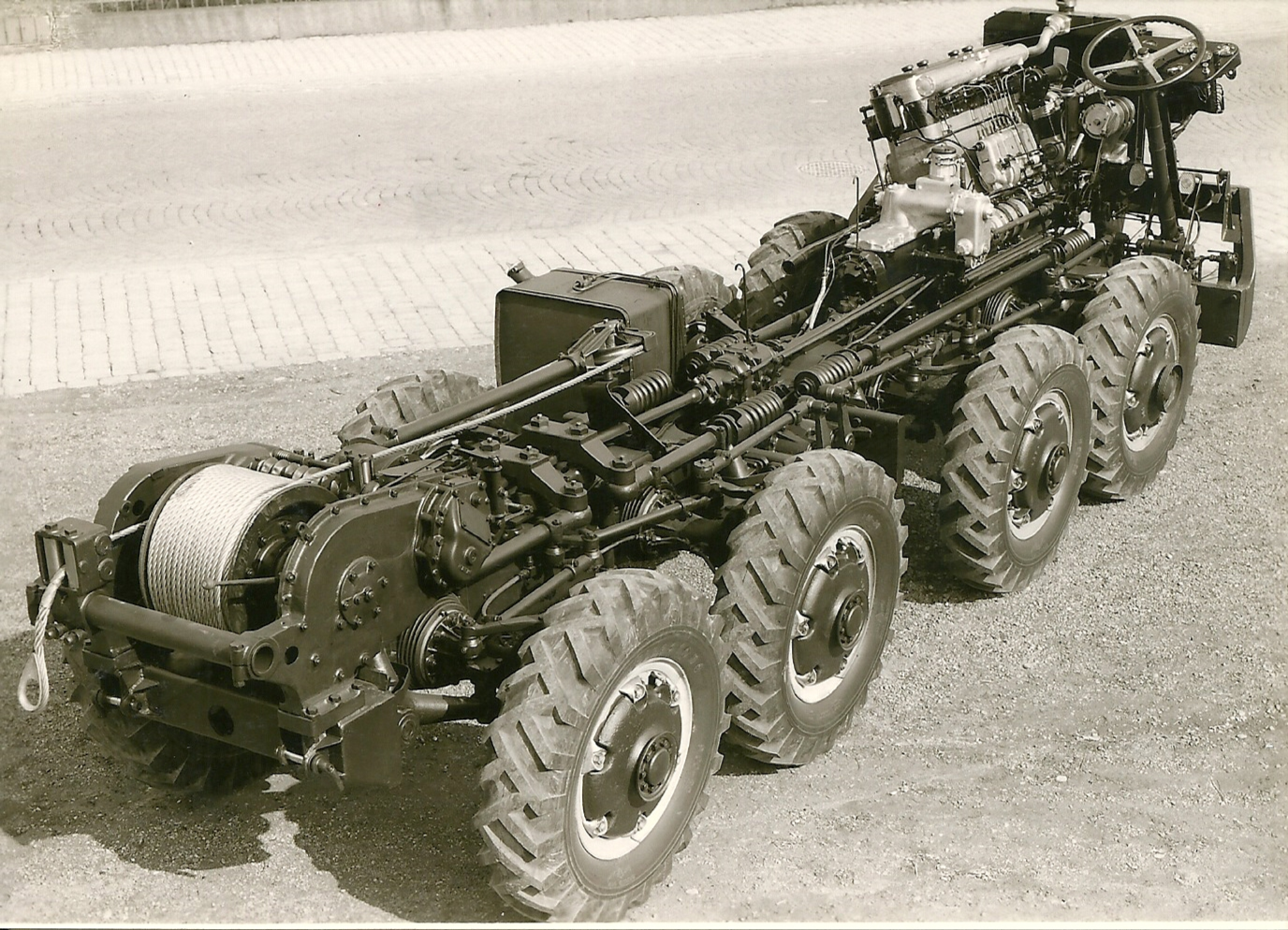
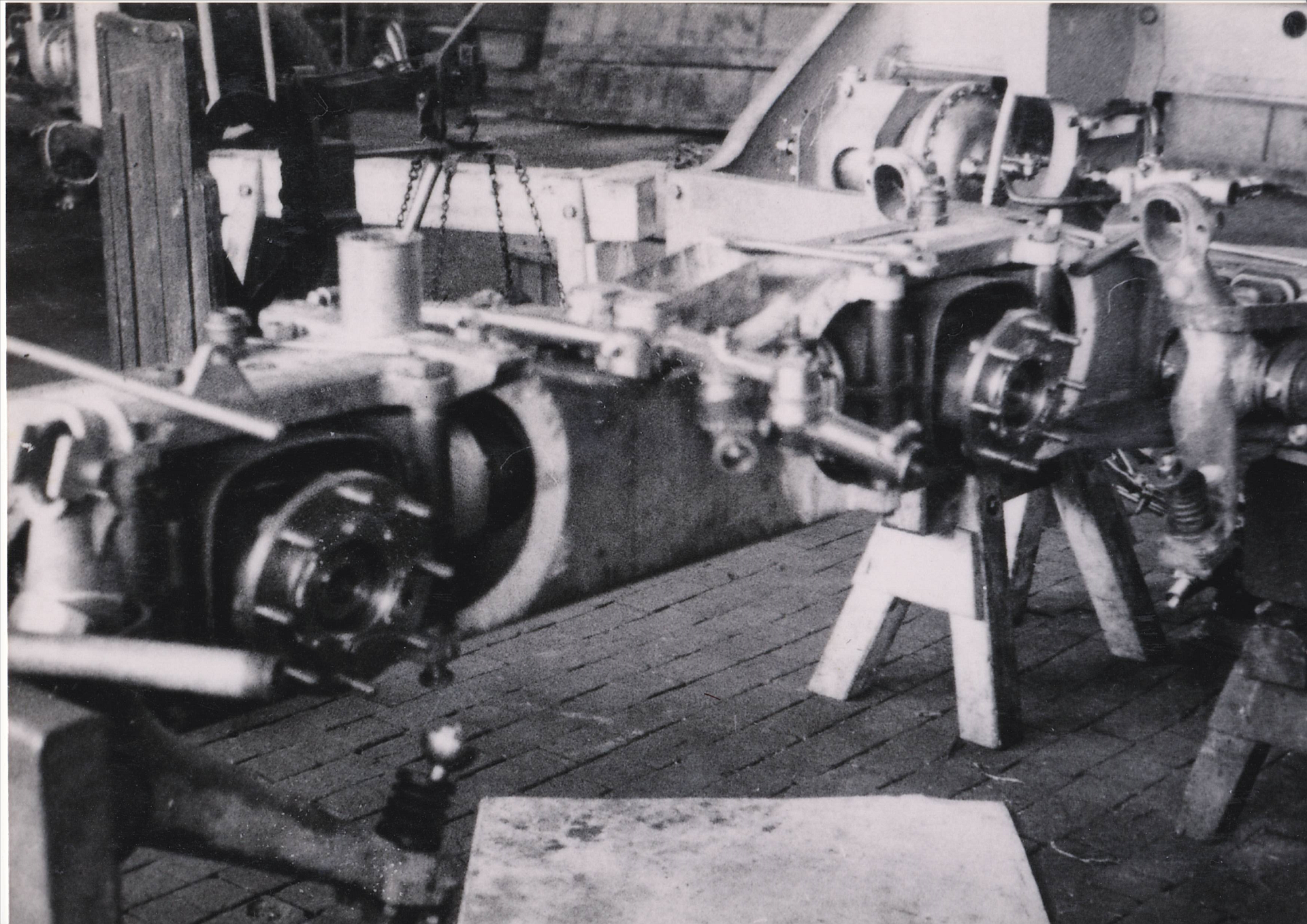
Anordnung der Stangen, Spiralfedern und Ausgleichsbalken am fertigen Chassis. Bei den Vorderrädern werden die beiden Räder der gleichen Wagenseite gegeneinander ausgeglichen. Durch die Ausgleichsbalken über den Hinterachsen werden alle vier Räder im Sinne von Pendelachsen gegeneinander ausgeglichen. |
 |
Die Halbachsen
Die schwingenden Halbachsen waren um die Fahrzeuglängsachse drehbar direkt im jeweiligen Differentialgehäuse gelagert. So wurde erreicht, das keine zusätzliche Führungen (Lenker) für Längs- und Querkräfte an den Halbachsen verbaut werden mussten. Die Differentiale ihrerseits waren in den Öffnungen des Zentralrohrrahmens (Brillen) fest montiert. Die Achsrohre wurden mit einem ölfestem Gummi zu den Differentialen hin abgedichtet. Die Halbachsen hatten am Radantrieb einen Ritzel-antrieb mit einer Untersetzung von 1:4, wodurch eine grössere Bodenfreiheit erreicht wurde. Bereift wurde das Fahrzeug mit der Dimension 9.00x20‘ auf Trilexfelgen. An den Felgen waren spezielle Haken zur Montage von dreiteiligen Schneeketten angeschweisst. Jedes Rad verfügte über eine Bremseinheit, die aus einem Radbremszylinder, einem Bremsbackenpaar und der Bremstrommel bestand. Das System wurde hydraulisch mit Druckluftunterstützung ausgelegt. Beim Betätigen des Bremspedals sorgte ein Steuerventil dafür, dass parallel zur hydraulischen Bremse dosiert Druckluft in den Hauptbremszylinder strömte und so die Pedalkraft des Fahrers verstärkte. Der Hauptbremszylinder wurde vorne rechts unter den Schutzplatten eingebaut.
 |
|
Differenziale in den Ausschnitten (Brillen) des Zentralrohrrahmens mit Anschlussflanschen für die Achsrohre der vorderen Halbachsen. Die Differentiale und Zwischenwellen (Längswellen) waren geschützt im Zentralrohrahmen untergebracht. |
 |
|
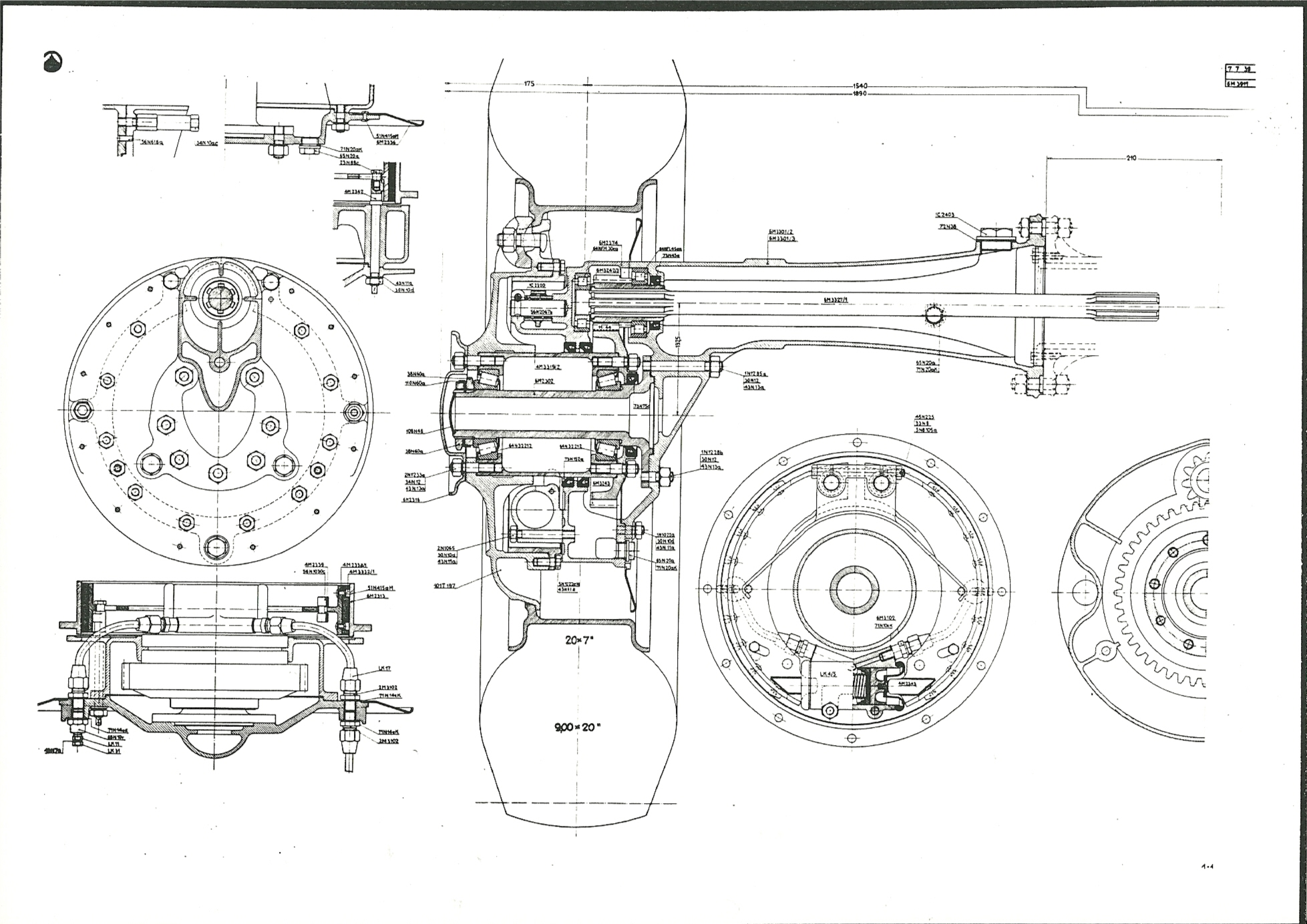
Schnitte durch eine Halbachse (Hinterachse) und einen Ritzel-Radantrieb. |
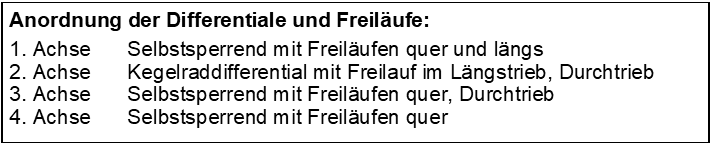
Differentiale und Freiläufe
Der adäquate Antrieb von vier Achsen war keine geringere Meisterleistung: Es sollten alle acht Räder gleichmässig zur guten Traktion beitragen. Um die Lenkbarkeit auf der Strasse und im Gelände zu gewährleisten, mussten die Drehzahlunterschiede der inneren und der äusseren Räder bei Kurvenfahrt ausgeglichen werden können. Bei schlechter oder fehlender Traktion eines einzelnen Rades - wenn es zum Beispiel in der Luft hängt - durfte dieses nicht durchdrehen. Die Differentiale mussten somit selbstsperrend wirken. Jede der vier Achsen hatte ihr eigenes Differential. Jede der acht Halbachsen erhielt einen separaten Kegelradantrieb mit einer Übersetzung von 1:2.22. Durch die Versetzung der einander gegenüberliegenden Halbachsen von je 10 mm nach vorne und hinten wurde die Verwendung identischer Kegelräderpaare für beide Seiten ermöglicht. Die „selbstsperrende“ Wirkung der Differentiale wurde mit je einem doppelt wirkenden Freilauf pro Halbachse erzeugt. Damit konnte nie ein Rad einer Achse gegenüber dem Antrieb zurückbleiben (Sperrwirkung), umgekehrt war es jedoch möglich, dass das auf der Aussenseite einer Kurven fahrende Rad dem Antrieb beziehungsweise dem inneren Rad vorauseilt, jedoch ohne Antriebsleistung, also im Freilauf. Die Freiläufe waren so konstruiert, dass sie sowohl bei Vorwärts- als auch bei Rückwärtsfahrt im Sinne des vorne Beschriebenen wirkten.
 |
 |
 |
|
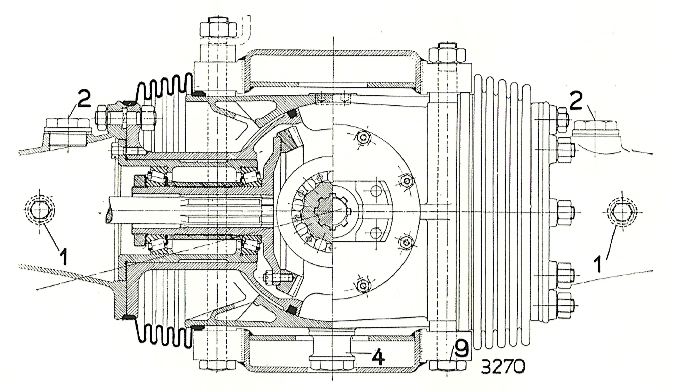
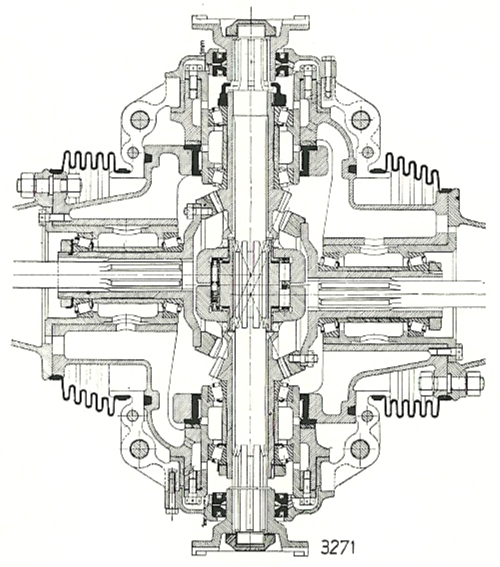
Längs- und Horizontalschnitt durch ein Differentialgetriebe. |
|
Im Längstrieb waren ebenfalls keine konventionellen Differentiale eingebaut. Zwischen dem Zusatzgetriebe und den Achsdifferentialen beziehungsweise zwischen den Achsdifferentialen übertrugen Zwischenwellen die Antriebskräfte. Die Antriebe der 2. und 3. Achsen waren mit je einem starren Durchtrieb zur 1. beziehungsweise 4. Achse ausgerüstet. Da die gelenkten Vorderräder bei Kurvenfahrten die grösseren Radien befahren als die ungelenkten Hinterräder, wurden im Längstrieb der Vorderachsen ebenfalls je ein Freilauf eingebaut. Diese waren prinzipiell gleich aufgebaut wie diejenigen der Radantriebe. Dieses System von Freiläufen in Quer- und Längsrichtung hatte zu Folge, dass bei Kurvenfahrten vorerst nur das jeweils innerste Rad (mit dem kleinsten Kurvenradius) voll antrieb. Die anderen Räder trugen in der Reihenfolge der befahrenen Kurvenradien erst zum Vortrieb bei, wenn die bereits antreibenden Räder genügend Schlupf hatten.
 |
|
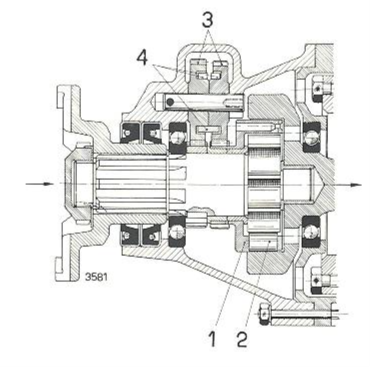
Damit ein Freilauf sowohl bei Vorwärts- wie auch bei Rückwärtsfahrt wirkte, musste der Rollenkäfig 1 jeweils in der Drehrichtung zurückgehalten werden, damit die Rollen 2 der Drehrichtung entsprechend eingekeilt wurden. Dies wurde dadurch erreicht, dass der Käfig über ein Vorgelege 3 von der Antriebswelle aus etwas langsamer angetrieben wurde. Die beiden Zahnräder des Vorgeleges differierten um je 1 Zahn und wurden durch eine Rutschkupplung 4 miteinander verbunden. |
Im Zusatzgetriebe (Verteilergetriebe) zwischen den Achsen 2 und 3 befanden sich die Übersetzungen für den Normalgang (nur die Hinterräder waren angetrieben), für den Geländegang (mit Zuschaltung der Vorderachsantriebe) sowie für den Nebenantrieb (Seilwinde). Die Untersetzung und der Antrieb für die Seilwinde konnten vom Fahrer direkt aus der Kabine geschaltet werden. Der Motor und das 5-Gang Schaltgetriebe waren auf dem Zentralrohrrahmen aufgebaut. Dies erhöhte den Schwerpunkt und zeigte sich im Gelände eher als Nachteil.
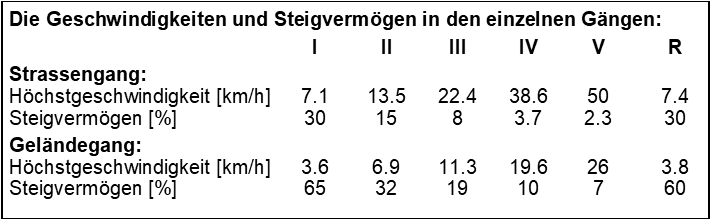
Die Geschwindigkeit war durch die Motorenenddrehzahl von 1‘900 U/min begrenzt. Im grössten Gang konnte auf der Strasse eine Geschwindigkeit von circa 50 km/h erreicht werden, im Geländegang bei voller Motoleistung eine minimale Geschwindigkeit von 3.6 km/h. Mit einer konventionellen Einscheiben-Trockenkupplung konnte der Kraftfluss zwischen Motor und Getriebe für den Gangwechsel getrennt werden.
 |
Als Motor wurde der CT1DM ausgewählt. Mit einer Bohrung von 110 mm und einem Hub von 140 mm, leistete der direkt eingespritzte Dieselmotor satte 105 PS - das war in der damaligen Zeit einer der stärkeren Motoren! Eine Besonderheit in dieser Zeit war, dass der Motorenblock aus Leichtmetall gegossen wurde. Mit der Trockensumpfschmierung konnte der Motor in jeder Stellung betrieben werden. Damit funktionierte er auch noch bei 65% Gefälle oder Steigung. Ebenso konnte man das Fahrzeug, sollte es einmal auf der Seite liegen, mit Hilfe der eigenen Seilwinde, der Umlenkrollen und einigen Bäumen oder Ähnlichem in der Nähe, selbstständig wieder aufstellen!
 |
|
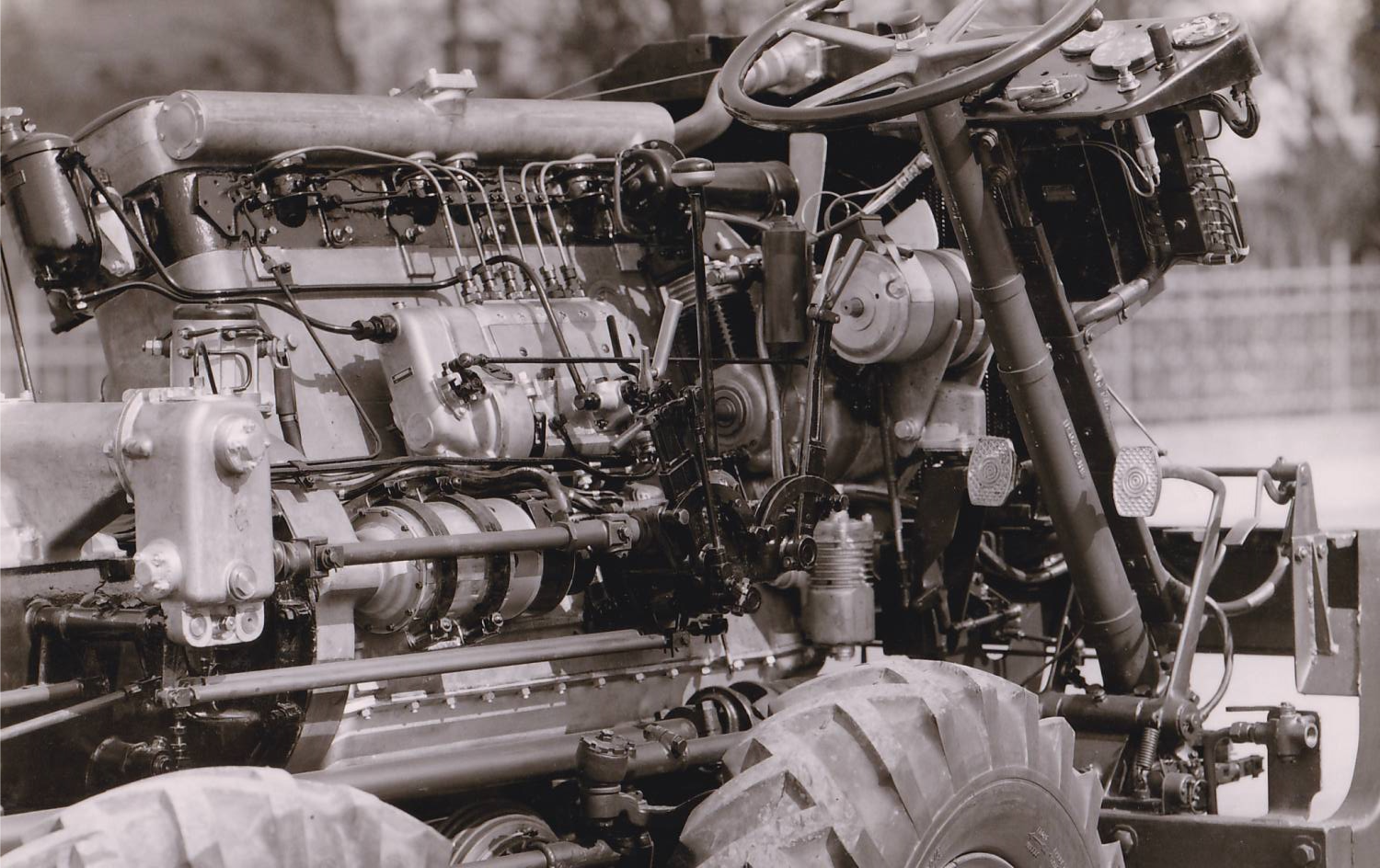
Der CT1DM im Chassis des 8M. Um dem Fahrer noch etwas Platz an seinem Arbeitsplatz zu gewährleisten, wurde der Motor 15° nach links gekippt und die Aggregate sehr kompakt angebaut. |
 |
|
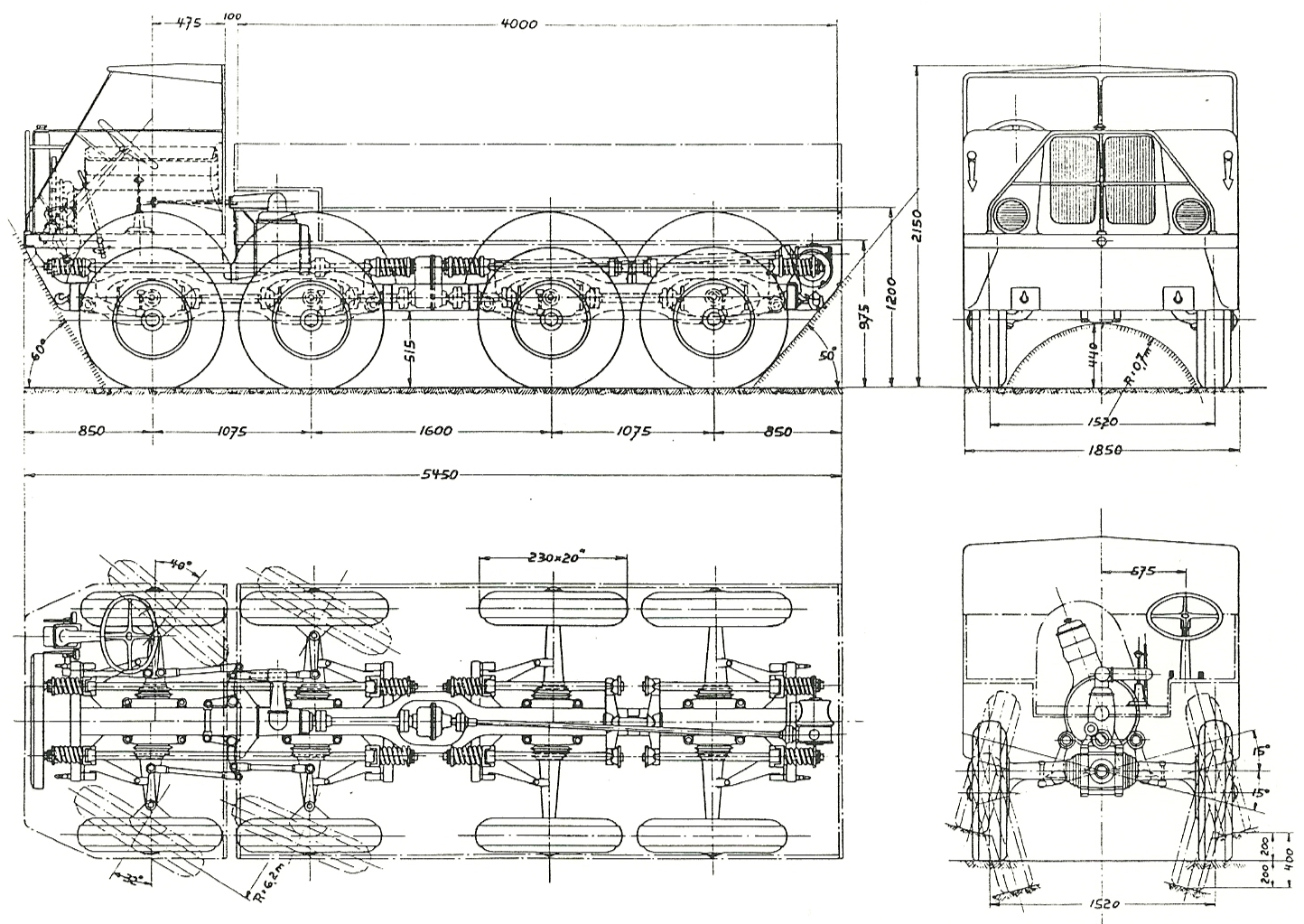
Darstellung des Fahrzeugkonzepts „Geländegängiges Chassis Type 8M“, datiert vom Oktober 1937. Alle wesentlichen Elemente wurden hier bereits zu Papier gebracht. Die ersten Prototypen wurden aber erst 1940 realisiert. |
 |
|
Der Militär-Prototyp. Der Tank befand sich noch seitlich links. |
Die Prototypen
Erst 1940 entstanden zwei Prototypen auf Basis der im ersten Teil dieses Berichts beschriebenen Patente und Konstruktionen sowie der Erfahrung der bereits früher realisierten Schwingachsfahrzeuge, namentlich dem 2M und den 4M. Das erste Fahrzeug mit Chassis-Nr. 24795/1 wurde nur mit Vorderachslenkung ausgeführt, ein zweites mit Chassis-Nr. 24795/2 hatte Allradlenkung. Mit den Prototypen wurden ausführliche Tests im Gelände gefahren. Die Konstruktion musste beweisen, was die Ingenieure ihr mit all der ausgeklügelten Technik mit auf den Weg gegeben hatten. Die K.T.A. prüfte das erste Fahrzeug auf Herz und Nieren, denn auch in Reihen der Militärs gab es Stimmen, welche der schweren, aufwändigen und teuren Ausführung sehr skeptisch gegenüber standen. Im September 1941 wurde schliesslich eine Serie von weiteren 78 Fahrzeugen nur mit Vorderradlenkung durch die K.T.A. bestellt. Die Wagen gelangten zwischen September 1943 und August 1945 zur Ablieferung. Die Serienausführung wich nur gering vom Prototypen ab. Der seitlich verbaute Tank wich zu Gunsten einer zweiten Werkzeugkiste. Stattdessen gab es nun zwei kleinere Tanks, welche links und rechts am Chassis von den Hinterrädern gut geschützt verbaut waren. Der 8M machte militärische Kariere als „M8“ oder vorerst als schwerer Geländelastwagen „sch. Gelastw., 3,5 t 8x8, Saurer M8“. Später wurde er zum mittleren Geländelastwagen degradiert. Eingesetzt wurden die Wagen namentlich als Zugfahrzeuge in der Artillerie. Im zweiten Weltkrieg, welcher voll im Gang war, spielte die Befestigung unseres Landes mit schweren Artilleriegeschützen eine zentrale Rolle. Da kam der für die damalige Zeit schwere M8 wohl spät aber nicht zu spät…
 |
|
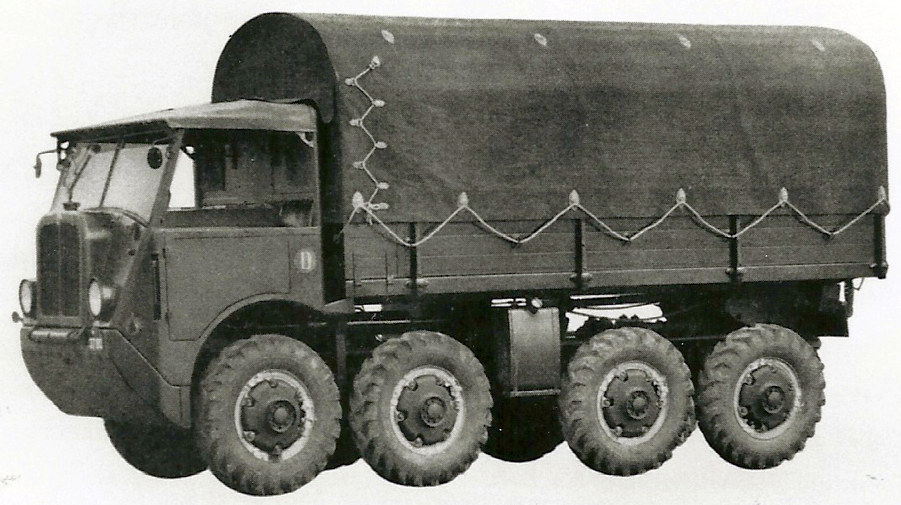
Serienfahrzeug auf dem Waffenplatz Brugg. |
 |
|
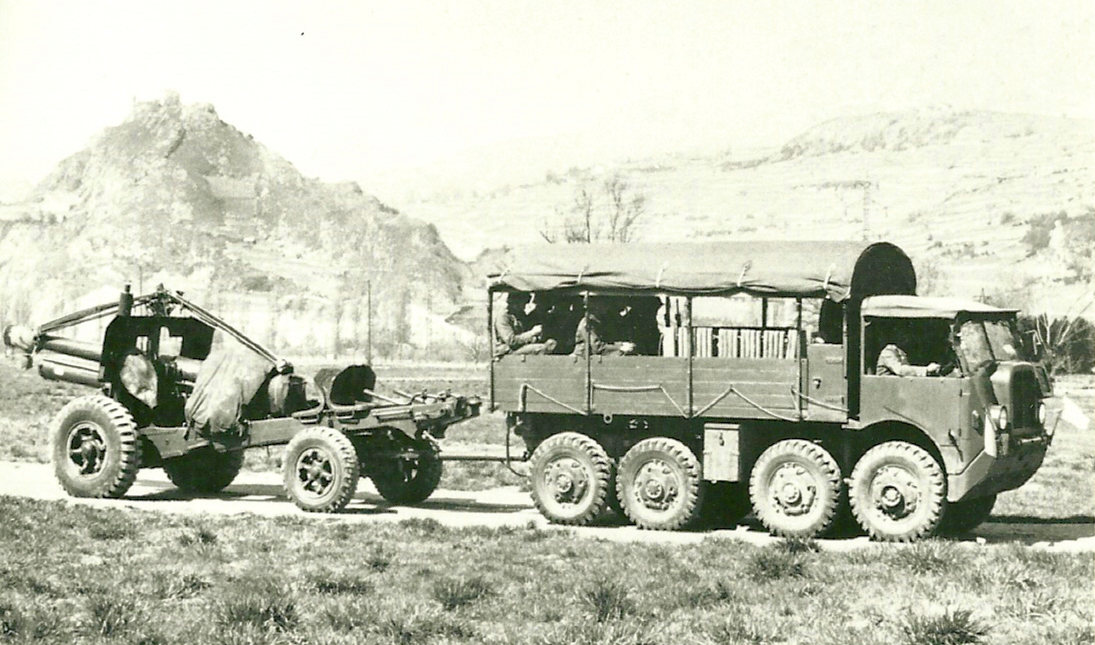
Der 8M in seinem Element: Ein schweres Geschütz am Haken und mit Mannschaft oder Munition. |
 |
|
Unbeladen hatte der 8M dank seiner Spiralfederung in den Ausgleichsstangen charakteristisch „X-Beine“. Mit seinem hohen Schwerpunkt und einer Breite von nur 2 Metern war die Kippgefahr nach wie vor gross. Selbst in den Handbüchern sind Hinweise, wie man das Fahrzeug mit Hilfe der eigenen Seilwinde wieder aufstellen kann. |
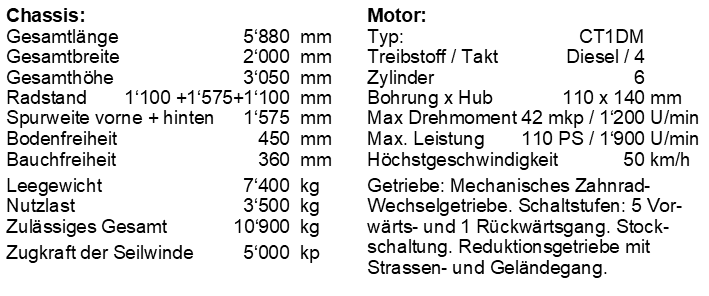
Technische Daten sch. Gelastw., 3,5 t, Saurer M8 (Serienausführung):
 |
Gegen Ende der 70er Jahre wurden die 8M aus der Armee ausgemustert. Die Fahrzeuge konnten von Privatpersonen an der Gant ersteigert werden. Einige der 8M blieben so in der Schweiz und wurden als Liebhaberfahrzeuge zu neuem Leben erweckt, obschon ein Betreiben eines solchen Lastwagens mit erheblichen Kosten verbunden ist. Zivile, gewerbliche Anwendungen gab es für die unterhaltsintensiven Fahrzeuge keine. Im März 1979 wurden neben vielen anderen Fahrzeugen einige 8M nach Brasilien verschifft. Im fernen Südamerika legten die Veteranen mehr Kilometer zurück als während ihrer ganzen Dienstzeit in der Heimat. Im Grenzgebiet zwischen Venezuela und Guyana wurden die Fahrzeuge als Transportmittel eingesetzt und nicht selten überladen. Im Amazonas wurden die Fahrzeuge abgeändert und beispielsweise zum Strassenbau eingesetzt. Die 8M waren auch hervorragend für Einsätze abseits befestigter Verkehrswege ausserhalb einer europäischen Infrastruktur geeignet.
 |
|
Verkaufte Saurer 8M zum Abtransport bereit. Das Bild wurde am 15. Juni 1978 in Grenchen aufgenommen. |
 |
|
Saurer 8M als Transportfahrzeug von Drogenhändlern im Spielfilm „Danger Zone“ von 1995. Die Aufnahme stammt aus Simbabwe. |
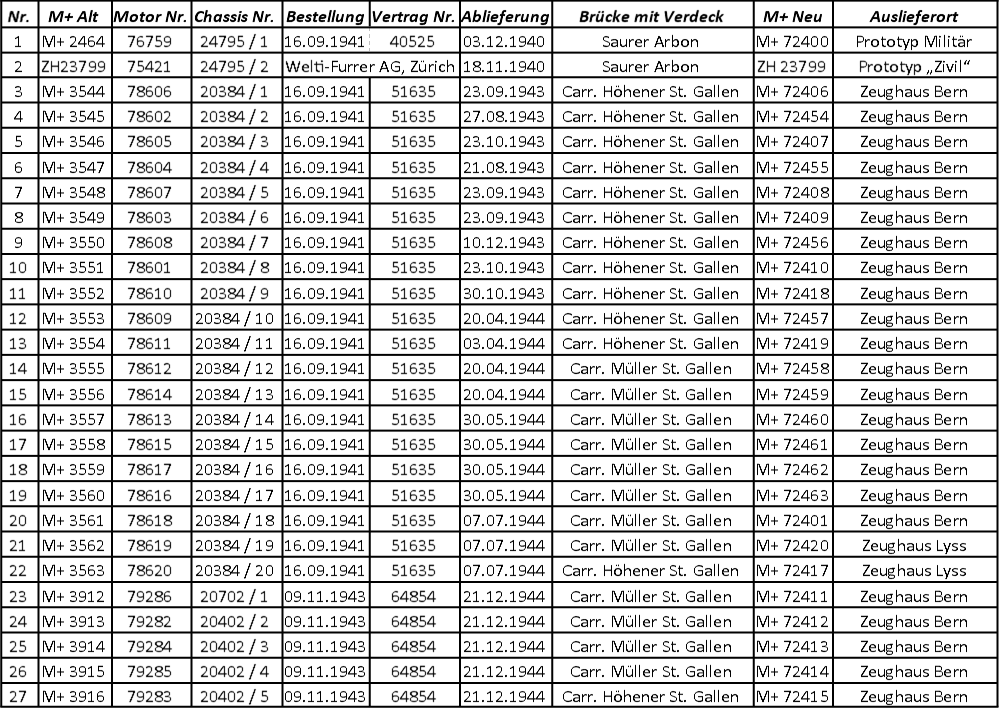
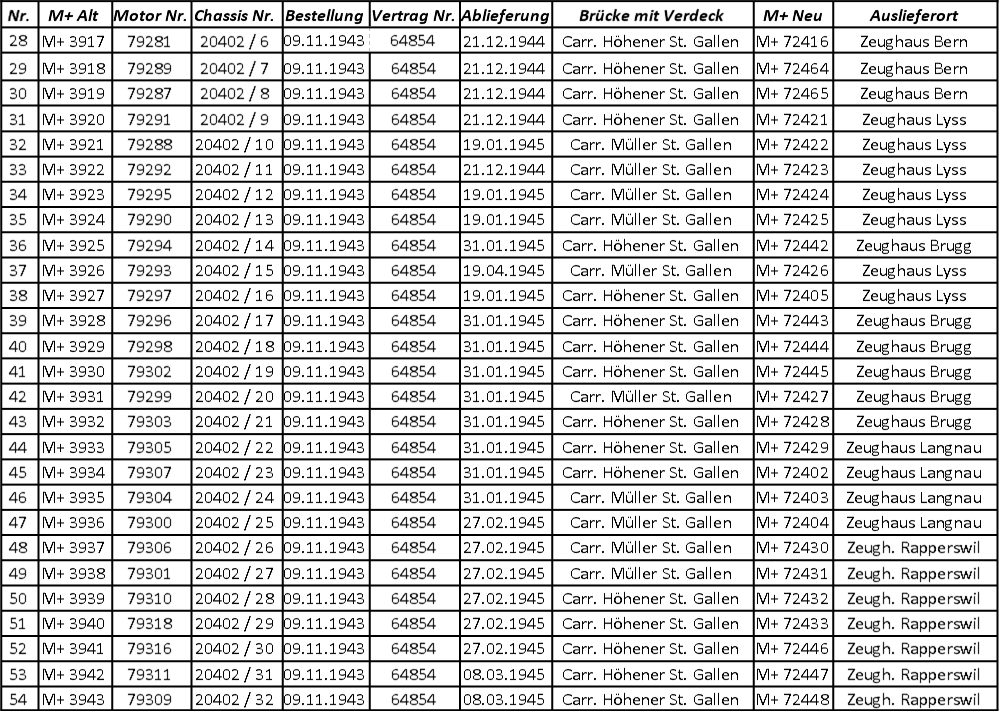
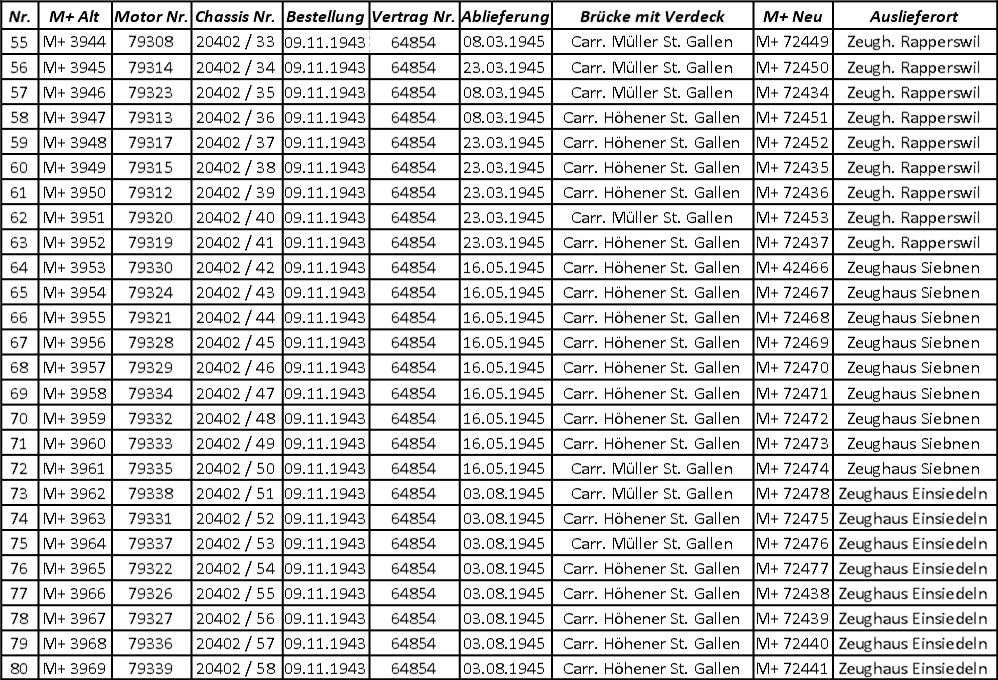
8M - Ablieferungen:
 |
 |
 |
Druckbare Version: Sonderdruck aus Federblatt 73:
![]()
pdf-Datei 5.25Mb

